
Lugar de origem:
China
Marca:
YOUNGYOU
Certificação:
CE
Número do modelo:
PY4030U-050
Contato E.U.
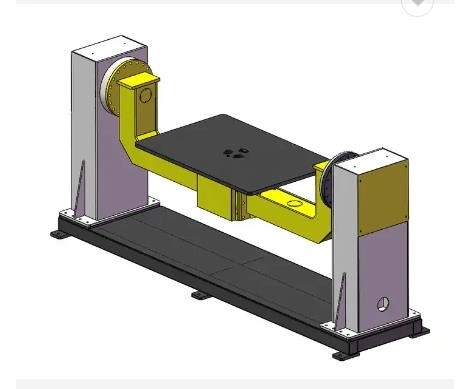




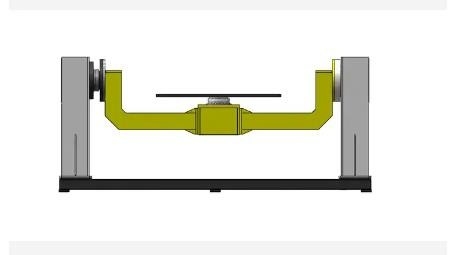
Feito no positioner de solda biaxial da carga 100-1000kg da linha central da plataforma giratória 380v 50-60hz da porcelana 1200*1200
Navegação da reflexão e tecnologia claras do posicionamento para robôs móveis
A navegação clara típica da reflexão que posiciona o método utilização principal o laser ou os sensores infravermelhos variando. Laser e infravermelho para usar a tecnologia clara da reflexão para a navegação e o posicionamento.
O sistema de navegação mundial do laser consiste geralmente em um mecanismo de gerencio do laser, em um refletor, em um dispositivo de recepção optoelectronic, e em um dispositivo por aquisição de dados e de transmissão.
Durante a operação, o laser é emitido para fora através de um mecanismo do espelho de gerencio. Ao fazer a varredura de um marco cooperativo composto de um refletor inverso, a luz refletida é processada por um receptor fotoelétrico como um sinal da detecção. O programa por aquisição de dados é começado ler os dados do disco de código do mecanismo de gerencio (o valor medido do ângulo do alvo), e transmitido então ao computador superior para o processo de dados com uma comunicação. Baseado na posição conhecida do marco e da informação detectada, o cargo atual e o sentido do sensor no sistema coordenado do marco podem ser calculados para conseguir uma navegação e um posicionamento mais adicionais.
O agrupamento do laser tem as vantagens do feixe estreito, bom paralelismo, dispersão pequena, e de alta resolução no sentido de agrupamento, mas é afetado igualmente extremamente por fatores ambientais. Consequentemente, como ao denoise o sinal recolhido ao usar o agrupamento do laser é igualmente um desafio principal. Além, o laser que varia igualmente tem os pontos cegos, fazendo o difícil conseguir a navegação e posicionando unicamente pelo laser. Em aplicações industriais, geralmente, é ainda amplamente utilizado em testes no local industriais dentro de uma escala específica, tal como a detecção de quebras do encanamento.
A tecnologia de detecção infravermelha é usada frequentemente em multi sistemas comum da vacância do obstáculo do robô formar uma grande área do robô “pele sensível” que cobre a superfície do braço do robô e pode detectar os vários objetos encontrados pelo braço do robô durante a operação.
Um sensor infravermelho típico inclui um diodo luminescente de circuito integrado que possa se emitir a luz infra-vermelha e um diodo fotossensível de circuito integrado que serva como um receptor. O sinal modulado é emitido por um tubo luminescente infravermelho, e o tubo fotossensível infravermelho recebe o sinal modulado infravermelho refletido pelo alvo. A eliminação da interferência infravermelha ambiental é assegurada pela modulação do sinal e por um filtro infravermelho dedicado. Se o Vo do sinal de saída representa a saída da tensão da intensidade de luz refletida, a seguir o Vo é uma função da distância entre a ponta de prova e o workpiece: Vo=f (x, p), onde p é o coeficiente de reflexão do workpiece. P é relacionado à cor e à aspereza de superfície do objeto do alvo. X - distância entre a ponta de prova e o workpiece.
Quando o workpiece é um alvo do mesmo tipo com o mesmo p-valor, x e o Vo correspondem linear. X pode ser obtido interpolando os dados experimentais de medidas da proximidade de vários objetos do alvo. Desta maneira, a distância entre o robô e o objeto do alvo pode ser medida usando os sensores infravermelhos, e outros métodos de processamento da informação podem igualmente ser usados para navegar e encontrar o robô móvel.
Embora o posicionamento de detecção infravermelho igualmente tenha vantagens tais como a sensibilidade alta, a estrutura simples, e o baixo custo, devido a sua definição do ângulo alto e à baixa definição da distância, são de uso geral como sensores de proximidade em robôs móveis detectar a aproximação ou os obstáculos repentinos do movimento, facilitando a parada da emergência dos robôs.
![]()
Sobre a empresa
Nosso trilho de guia cooperou com muitos tipos conhecidos internacionais do robô, tais como ABB KUKA FANUC Yaskawa UR. As empresas envolvidas incluem principalmente palletizing, carregar e descarregar. A carga das escalas do trilho de guia de 500kg a 5000kg. O comprimento do trilho de guia é personalizado de acordo com as necessidades de clientes. Nós fizemos um caso que um robô de ABB IRB6700 corresponde a 20 máquinas do CNC, e um trilho de guia 50m longo termina o movimento reciprocando, carregando e descarregando do robô. O número de robôs é reduzido extremamente e o custo da integração salvar.
Nossa empresa igualmente oferece robôs industriais a preços muito favoráveis colocar junto ordens a mais baixos preços.
A boa vinda embarcou à força, China, para investigar nossos robôs e trilhos!
Abastecimento em produtos da empresa
Robô de ABB
Robô de KUKA
Robô de Yaskawa
Robô de Fanuc
Robô de UR
Cobot
Trilho de guia
Cobot fez em China
Especificações de produto
Tabela de parâmetros do produto


Empacotamento e transporte
![]()
![]()
Envie-nos seu inquérito diretamente




