
Lugar de origem:
China
Marca:
YOUNGYOU
Certificação:
CE
Número do modelo:
GBS6-C1400
Contato E.U.

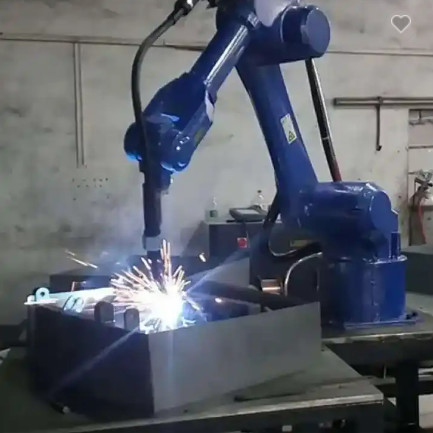

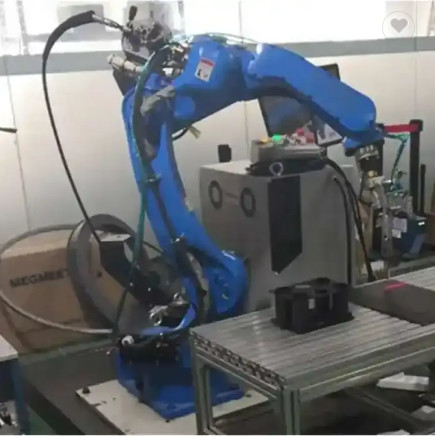


Robô de solda automática de 6 linhas centrais com a máquina de solda elétrica de CHD MIG 500 e o Positioner de solda
Tecnologia ultrassônica da navegação e do posicionamento para robôs móveis
O princípio de trabalho de navegação ultrassônica e posicionamento é igualmente similar àquele do laser e do infravermelho. Geralmente, as ondas ultrassônicas são emitidas pela ponta de prova da emissão do sensor ultrassônico, e pelos obstáculos do encontro das ondas ultrassônicas no meio e para retornar ao dispositivo de recepção.
Recebendo o sinal ultrassônico da reflexão emitiu-se só e o cálculo da distância S da propagação baseada na diferença de tempo entre a emissão e a recepção ultrassônicas do eco, assim como a velocidade da propagação, a distância do obstáculo ao robô pode ser obtida. Há uma fórmula: S=Tv/2, onde T - a diferença de tempo entre a emissão ultrassônica e recepção; V - a velocidade das ondas ultrassônicas que propagam no meio.
Naturalmente, há igualmente muito navegação do robô móvel e posicionando as tecnologias que usam dispositivos separados transmitir e receber. Os dispositivos de recepção múltiplos estão arranjados no mapa ambiental, quando as pontas de prova transmissoras forem instaladas no robô móvel.
Na navegação e no posicionamento de robôs móveis, devido aos defeitos inerentes de sensores ultrassônicos, tais como a reflexão de espelho e ângulo de feixe limitado, é difícil obter inteiramente informação ambiental circunvizinha. Consequentemente, os sistemas de detecção ultrassônicos compostos de sensores múltiplos são usados geralmente para estabelecer modelos ambientais correspondentes, e a informações recolhidas pelos sensores é transmitida ao sistema de controlo do robô móvel com uma comunicação de série, o sistema de controlo usa então determinados algoritmos para processar os dados correspondentes baseados nos sinais recolhidos e no modelo matemático estabelecido obter a informação do ambiente da posição do robô.
Devido às vantagens do baixo custo, da taxa rápida da recolha de informação, e da definição alta da distância, os sensores ultrassônicos têm sido por muito tempo amplamente utilizados na navegação e no posicionamento de robôs móveis. Além disso, não exige a tecnologia complexa do equipamento da imagem ao recolher a informação ambiental, tendo por resultado a velocidade de agrupamento rápida e o bom desempenho do tempo real.
Ao mesmo tempo, os sensores ultrassônicos são igualmente menos susceptíveis às condições ambientais externos tais como condições meteorológicas, a luz ambiental, as sombras do obstáculo, e a aspereza de superfície. A navegação do ultrassom e o posicionamento foram amplamente utilizados em vários sistemas da percepção de robôs móveis.
![]()
Sobre a empresa
Nosso trilho de guia cooperou com muitos tipos conhecidos internacionais do robô, tais como ABB KUKA FANUC Yaskawa UR. As empresas envolvidas incluem principalmente palletizing, carregar e descarregar. A carga das escalas do trilho de guia de 500kg a 5000kg. O comprimento do trilho de guia é personalizado de acordo com as necessidades de clientes. Nós fizemos um caso que um robô de ABB IRB6700 corresponde a 20 máquinas do CNC, e um trilho de guia 50m longo termina o movimento reciprocando, carregando e descarregando do robô. O número de robôs é reduzido extremamente e o custo da integração salvar.
Nossa empresa igualmente oferece robôs industriais a preços muito favoráveis colocar junto ordens a mais baixos preços.
A boa vinda embarcou à força, China, para investigar nossos robôs e trilhos!
Abastecimento em produtos da empresa
Robô de ABB
Robô de KUKA
Robô de Yaskawa
Robô de Fanuc
Robô de UR
Cobot
Trilho de guia
Cobot fez em China
Especificações de produto
Tabela de parâmetros do produto
![]()
![]()
![]()
![]()
Empacotamento e transporte
![]()
![]()
Envie-nos seu inquérito diretamente

