
Lugar de origem:
China
Marca:
YOUNGYOU
Certificação:
CE
Número do modelo:
YYSC11
Contato E.U.
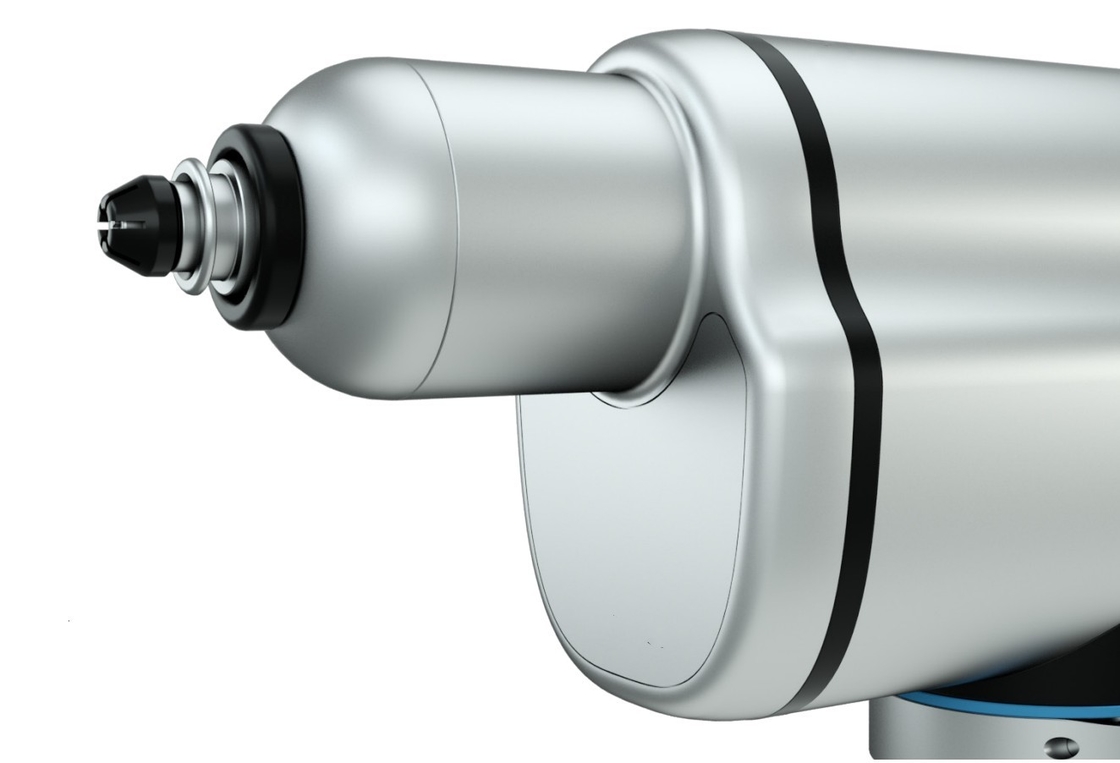

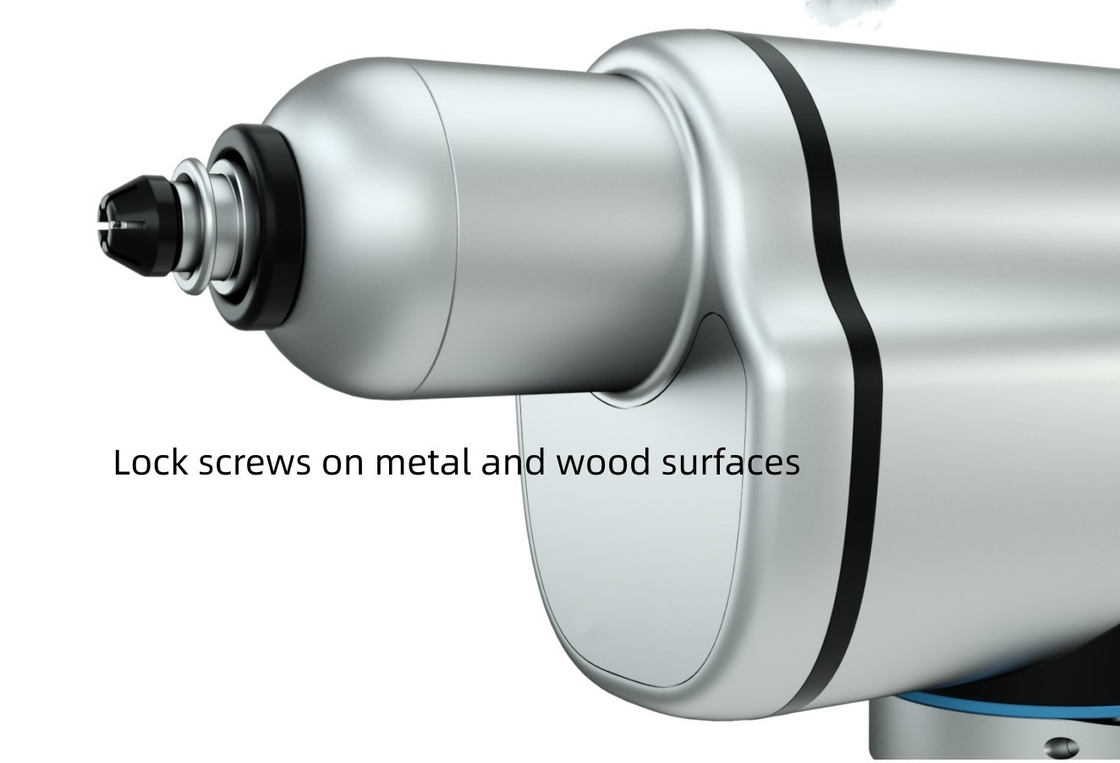
Prendedor automático do parafuso de travamento apropriado para os parafusos m1.6~m6 adaptados ao robô do kuka de ABB
Chave de fenda inteligente, fácil realizar o processo de fechamento de parafusos múltiplos
Para evitar o tempo ocioso da máquina devido à conversão manual
• Estado de trabalho ótimo - consistente, rápido - com força dinâmica
Controle e detecção de erro inteligente
• Expanda a possibilidade de automatização colaboradora com proteção incorporado
![]()
![]()
Características de produto
Envie-nos seu inquérito diretamente

