

2023-07-12
2. Segurar procura um caminho mais curto a falha do módulo de poder do robô de ABB procura um caminho mais curto a placa
Fatores humanos: O hardware da troca quente é muito perigoso, e muitas falhas da placa de circuito são causadas pela troca quente. O uso da força impróprio ao introduzir cartões e tomadas com poder pode causar dano às relações, microplaquetas, etc., conduzindo para danificar à placa de circuito do robô; Porque a época de usar aumentos dos robôs, os componentes na placa de circuito do robô envelhecerão naturalmente, conduzindo às falhas da placa de circuito do robô.
Fatores ambientais: Devido à manutenção imprópria pelo operador, a placa de circuito do robô é coberta com a poeira, que pode causar o sinal procura um caminho mais curto.
3. Quando for necessário aos robôs industriais alternativos
Após o primeiro poder sobre da máquina nova.
Antes de fazer alguma alteração.
3. Após ter terminado as alterações.
4. Se os robôs industriais são importantes, devem ser feitos uma vez por semana numa base regular.
5. É o melhor fazer também um backup na movimentação de USB.
6. suprima regularmente de backup velhos para livrar acima o espaço do disco rígido.
4. Como segurar a situação onde o robô é girado sobre e o pendente de ensino se mantém indicar a seguinte relação
 A situação acima é que não há nenhuma conexão de uma comunicação estabelecida entre o pendente de ensino e o controlador principal do robô, e as razões para não estabelecer a conexão para incluir:
A situação acima é que não há nenhuma conexão de uma comunicação estabelecida entre o pendente de ensino e o controlador principal do robô, e as razões para não estabelecer a conexão para incluir:
1. O anfitrião do robô é defeituoso.
2. O cartão incorporado dos CF (cartão do SD) do anfitrião do robô é defeituoso.
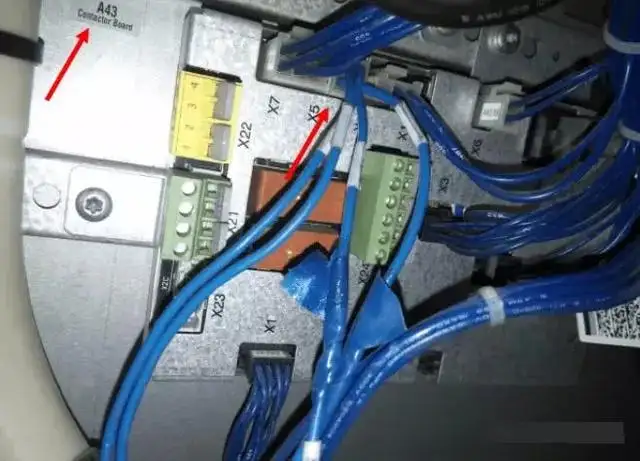
3. O cabo da rede entre o pendente de ensino e o anfitrião é fraco, etc.
Método de processamento: 1. Verifique se o anfitrião seja normal e se o cartão do SD no anfitrião é normal.
2. Verifique se o cabo da rede do pendente de ensino ao anfitrião é conectado corretamente.
5. Que é o significado do lembrete do tempo de manutenção 10106 quando o robô indica uma mensagem de alarme?
Esta situação é um lembrete inteligente da manutenção periódica do robô de ABB.
6. Como segurar um mau funcionamento do sistema quando o robô incorporar um estado do poder sobre?
1. Reinicie o robô uma vez.
Se não, verificação o pendente de ensino para alertas mais detalhados do alarme e para tomar a ação.
3. reinício.
4. Se ainda não pode ser liberado, partida da tentativa B.
5. Se ainda não trabalha, tente por favor a partida de P.
6. Se ainda não trabalha, tente-me por favor partida (isto retornará o robô a seus ajustes da fábrica, será cuidadoso).
7. Pode o backup do robô ser compartilhado por robôs múltiplos?
No. por exemplo, o backup do robô A pode somente ser usado para o robô A, não para o robô B ou C, enquanto este pode causar falhas de sistema.
8. Que arquivos podem ser compartilhados no backup do robô?
Se dois robôs são do mesmos modelo e configuração. Você pode compartilhar do programa RÁPIDO e do arquivo de EIO, mas após a partilha, igualmente precisa de ser verificada antes que possa ser usada normalmente.
9. Que é a origem mecânica dos robôs? Onde está a origem mecânica?
Cada um dos seis servos motores do robô tem uma origem mecânica fixa original. O ajuste incorreto da origem mecânica do robô causará problemas tais como movimento limitado ou incorreto do robô, da incapacidade andar em uma linha reta, e do dano grave ao robô.
10. Como cancelar o alarme da monitoração da ação do robô 50204?
1. Altere a ação do robô que monitora parâmetros (no menu da monitoração da ação do painel de controle) para combinar a situação real.
2. Use o comando de AccSet reduzir a aceleração do robô.
3. reduza v no data_ da velocidade a opção da podridão.
11. Como segurar o alarme “50296, diferença dos dados da memória de SMB” quando o robô for posto sobre pela primeira vez?
1. Calibração seleta do menu principal de ABB.
2. clique sobre ROB_ 1. incorporam a tela da calibração e a memória seleta de SMB.
3. “avançados seletos”, incorporam e clicam “a memória clara do armário de controle”.
4. Após a terminação, clique “próximo” e clique então a “atualização”.
5. ‘armário de controle trocado seleto ou braço robótico, atualizando o armário de controle com dados da memória de SMB’.
12. Como personalizar a velocidade do movimento da trajetória do robô no programa RÁPIDO?
1. Dados seletos do programa do menu principal do pendente de ensino.
2. Após ter encontrado o tipo de dados Speeddata, clique novo.
3. clique sobre o valor inicial, e os significados das quatro variáveis Speeddata são: o v_ TCP representa a velocidade de corrida linear do robô, podridão do v_ representa a velocidade rotatória do robô, v_ Leax representa a velocidade de funcionamento linear da linha central externo, v_ Reax representa a velocidade rotatória da linha central externo. Se não há nenhuma linha central externo, os últimos dois não precisam de ser alterados.
4. Os dados personalizados podem ser chamados no programa RÁPIDO.
13. Pesquisa de defeitos de 6 falhas comuns no reparo do servo motor do robô de ABB
1. Como segurar o erro de excesso do contador de erro do motor durante a rotação de alta velocidade?
A falha do excesso do contador de erro do motor ocorre durante a rotação de alta velocidade.
Contramedida 1: Verifique se a fiação do cabo distribuidor de corrente do motor e do cabo do codificador está correta e se o cabo é danificado.
A falha do excesso do contador de erro do motor ocorre ao entrar um pulso longo do comando.
A falha do excesso do contador de erro do motor ocorreu durante a operação.
Contramedida 2: Aumente o valor de ajuste do nível do excesso do contador de erro; Retarde a velocidade de rotação; Estenda o tempo da aceleração e de retardação; A carga é demasiado pesada, e é necessário selecionar a partir do zero um motor da capacidade maior ou reduzir a carga, e instala organizações da transmissão tais como redutores para aumentar a carga.
2. Que deve ser feito se não trabalha quando há uma saída de pulso?
Supervisione o valor atual da saída de pulso do controlador e se a luz da saída de pulso está piscando, reconheça que o pulso do comando esteve cumprido e outputting agora normalmente;
Verifique se o cabo de controle, o cabo distribuidor de corrente, e o cabo do codificador do controlador ao motorista são prendidos incorretamente, danificado, ou no contato pobre;
Verifique se o freio do servo motor com freio tem sido aberto agora;
Supervisione se o painel do motorista servo reconhece a entrada de comandos do pulso;
O comando corrido da operação é normal;
O formulário do controle deve escolher o formulário do controle direcional;
É o tipo do pulso de entrada ajustado pelo motorista servo consistente com o ajuste do pulso do comando;
Assegure-se de que o lado que positivo a movimentação é parada, o sinal da rotação de parada da movimentação do lado da rotação, e o sinal restaurado contrário de erro não esteja entrado, a carga é desligada, e a operação da nenhum-carga é normal. Verifique o sistema mecânico.
3. Que devo eu fazer se não há nenhum relatório da sobrecarga com carga?
Se ocorre quando o sinal corrido servo está conectado e nenhum pulso está emitido:
Verifique a fiação do cabo distribuidor de corrente do servo motor para ver se há algum dano pobre do contato ou do cabo; Se é um servo motor com um freio, o freio deve ser girado sobre; É o ganho do laço da velocidade ajustou-se demasiado alto; É a constante de tempo integral do laço da velocidade ajustou-se demasiado pequeno.
Se os únicos maus funcionamentos servo durante a operação:
É o ganho do circuito do azimute ajustou-se demasiado alto; É a amplitude de posicionar a conclusão ajustou-se demasiado pequeno; Verifique se não há nenhum rotor fechado no eixo do servo motor e ajuste a maquinaria a partir do zero.
4. Como tratar os sons ou as vibrações anormais durante a operação?
Fiação servo:
Use cabos distribuidores de corrente estandardizados, cabos do codificador, cabos de controle, e cabos para verificar para ver se há dano; Verifique se há umas fontes da interferência perto da linha de controle, e se são paralelos ou demasiado próximos aos cabos distribuidores de corrente atuais altos próximos; Verifique se há alguma mudança no potencial do terminal aterrando assegurar aterrar excelente.
Parâmetros servo:
O ajuste servo do ganho é demasiado grande, e recomenda-se ajusta a manualmente ou ativamente os parâmetros servo a partir do zero; Reconhecendo o ajuste da constante de tempo do filtro da resposta da velocidade, com um valor inicial de 0, é possível aumentar o valor ajustado testando; O ajuste eletrônico da relação da engrenagem é demasiado grande, defendendo para restaurar aos ajustes da fábrica; Ressonância entre o sistema servo e o sistema mecânico, testando e ajustando a frequência e a amplitude do filtro de entalhe.
Sistema mecânico:
O acoplamento que conecta o eixo do motor e o sistema do equipamento afastou-se, e os parafusos da instalação não foram apertados; O acoplamento pobre das polias ou das engrenagens pode igualmente conduzir às mudanças no torque da carga. Operação da nenhum-carga do teste. Se a operação da nenhum-carga é normal, verificação se há alguma anomalia na parte de ligamento do sistema mecânico; Admita se a inércia, o torque, e a velocidade da carga são demasiado grande, teste a operação da nenhum-carga, e se a operação da nenhum-carga é normal, reduza a carga ou substitua o motorista e o motor com uma capacidade maior.
5. Como segurar o controle impreciso da orientação e o posicionamento durante o reparo do servo motor do robô de ABB?
Em primeiro lugar, reconheça se o valor declarado real do pulso do controlador é consistente com o valor previsto, e se não, verifique e corrija o programa;
Supervisione se o número de comandos do pulso recebidos pelo motorista servo combina esse anunciado pelo controlador. Se não, verificação o cabo de controle; Verifique se o ajuste do formulário servo do pulso do comando é consistente com o ajuste do controlador, tal como CW/CCW ou pulse+direction;
O ajuste servo do ganho é demasiado grande, por favor ajusta manualmente ou ativamente o ganho servo a partir do zero; O servo motor é erros acumulados inclinados durante o movimento reciprocando. Recomenda-se ajustar um sinal mecânico da origem sob as circunstâncias permitidas pelo processo, e executa-se a operação de busca da origem antes que o erro exceda a escala permitida; O sistema mecânico próprio tem a baixa precisão ou a organização anormal da transmissão (tal como o desvio do acoplamento entre o servo motor e o sistema do equipamento).
6. o reparo do servo motor do robô de ABB, operação de controle direcional, falha da velocidade excessiva relatou. Como o segurar?
Assim que o sinal corrido servo for conectado, provocará: verifique se a fiação do cabo distribuidor de corrente de servo motor e do cabo do codificador é correta e não danificada.
14. Como fazem robôs industriais de ABB se submetem à manutenção rotineira?
Antes da operação normal do “da inspeção freio”, é necessário verificar o freio do motor de cada linha central. O método da inspeção para o freio do motor é como segue:
1. corrida a linha central de cada braço robótico a sua posição da carga máxima.
2. volta ligar de seleção de modo do motor o controlador do robô ao posição de repouso dos MOTORES.
3. Verifique se o eixo está em sua posição original. Se o braço mecânico ainda mantém sua posição depois que o motor está desligado, indica que o freio está nas boas condições.
Perigo da função de perda da operação da retardação (250mm/s)
Não mude a relação da engrenagem ou outros parâmetros do movimento do computador ou do pendente de ensino. Isto afetará a função da operação da retardação (250mm/s).
15. Diversos pontos para pagar a atenção a ao usar auxílios de ensino com segurança:
O botão de possibilidade do dispositivo instalado no pendente de ensino, quando pressionado incompletamente, muda o sistema aos MOTORES no modo. Quando o botão for liberado ou pressionado inteiramente, as mudanças de sistema aos MOTORES FORA do modo.
16. A fim usar com segurança auxílios de ensino, os seguintes princípios devem ser seguidos:
1.When o botão de possibilidade do dispositivo não pode perder sua função durante a programação ou a eliminação de erros, e o robô não precisa de mover-se, para liberar imediatamente o botão de possibilidade do dispositivo.
2. Quando os pessoais de programação entram em uma área segura, devem sempre levar o pendente de ensino em seu corpo para impedir que outro movam o robô.
17. Ao trabalhar dentro da escala de trabalho do braço robótico, os seguintes pontos devem ser observados:
1. O interruptor da seleção de modo sobre o controlador deve ser girado para a posição manual a fim operar o dispositivo de possibilidade para desligar o computador ou para operar-se remotamente;
2. Quando o interruptor da seleção de modo estiver ligada
3. atenção do pagamento à linha central de rotação do braço robótico, para ser cuidadoso quando o cabelo ou a roupa obtiverem misturado acima. Também, atenção do pagamento a outros componentes selecionados ou equipamento no braço robótico;
4. Verifique o freio do motor de cada linha central.
18. Desvio do toque
Fenômeno 1: A posição tocada pelos dedos não coincide com a seta do rato.
Razão: Após ter instalado o programa do motorista, o pendente de ensino não tocou verticalmente no centro da posição do bullseye durante a calibração.
Solução: Afira novamente a posição.
Fenômeno 2: Algumas áreas têm o toque exato, quando outro tiverem o desvio no toque.
Causa: Uma grande quantidade de poeira ou de escala acumula nas listras acústicas da reflexão em torno do tela táctil da onda acústica de superfície, que afeta a transmissão de sinais acústicos.
Solução: Limpe o tela táctil, pagando a atenção especial a limpar as listras da reflexão da onda sadia por todos os lados do tela táctil. Ao limpar, desligue a fonte de alimentação do cartão de controle do tela táctil.
19. Toque de ensino do pendente nenhuma resposta
Fenômeno: Ao tocar na tela, as setas do rato não se movem e não há nenhuma mudança em posição.
Razão: Há muitas razões para este fenômeno, como segue:
1. A poeira ou a escala acumulada nas listras acústicas da reflexão em torno do tela táctil da onda acústica de superfície são muito séria, fazendo com que o tela táctil não trabalham;
2. mau funcionamento do tela táctil;
3. O cartão de controle do tela táctil funcionou mal;
4. A linha de sinal do tela táctil funcionou mal;
5. A porta de série dos maus funcionamentos do anfitrião;
6. O sistema operacional do pendente de ensino funcionou mal;
7. erro da instalação do motorista de tela táctil.
Solução: Observe a luz indicadora do sinal do tela táctil, que pisca regularmente em circunstâncias normais, aproximadamente uma vez por segundo.
Ao tocar na tela, o pendente de ensino vai preto, que é um problema complexo. Se a economia de energia do luminoso é ajustada, a tela preta é normal; Se a segunda palavra na área de controle do sistema é operada acidentalmente, a tela igualmente irá preta. Se os primeiros dois pontos são excluídos, atualização aos firmware os mais atrasados para a revisão.
Envie-nos seu inquérito diretamente

